Rigid Body
Un corps rigide dans Blender est un corps solide qui va pouvoir rentrer en collision avec d'autres objets et rebondir en toute cohérence avec la réalité. Il sera possible d'enregistrer chaque image clef de ce mouvement. Grâce aux "Rigid Body Constraint" il sera possible de simuler de véritable machinerie, très utile pour la scénographie.
Lorsque vous attribuer le Physic "Rigid Body" à un objet, il va se mouvoir dans le sens de la gravité que vous aurez défini dans "Properties/scène/gravity". Il faut pour le conserver sur la vue 3D lui opposer un autre objet comme un sol ou un mur sur lequel on aura mis un physic "Collision"
Pour voir votre objet subir la gravité , il faut lancer l'animation sur la Timeline.
Plus un objet aura de faces, plus son mouvement sera élégant. Mais il sera aussi plus gourmand en ressources.
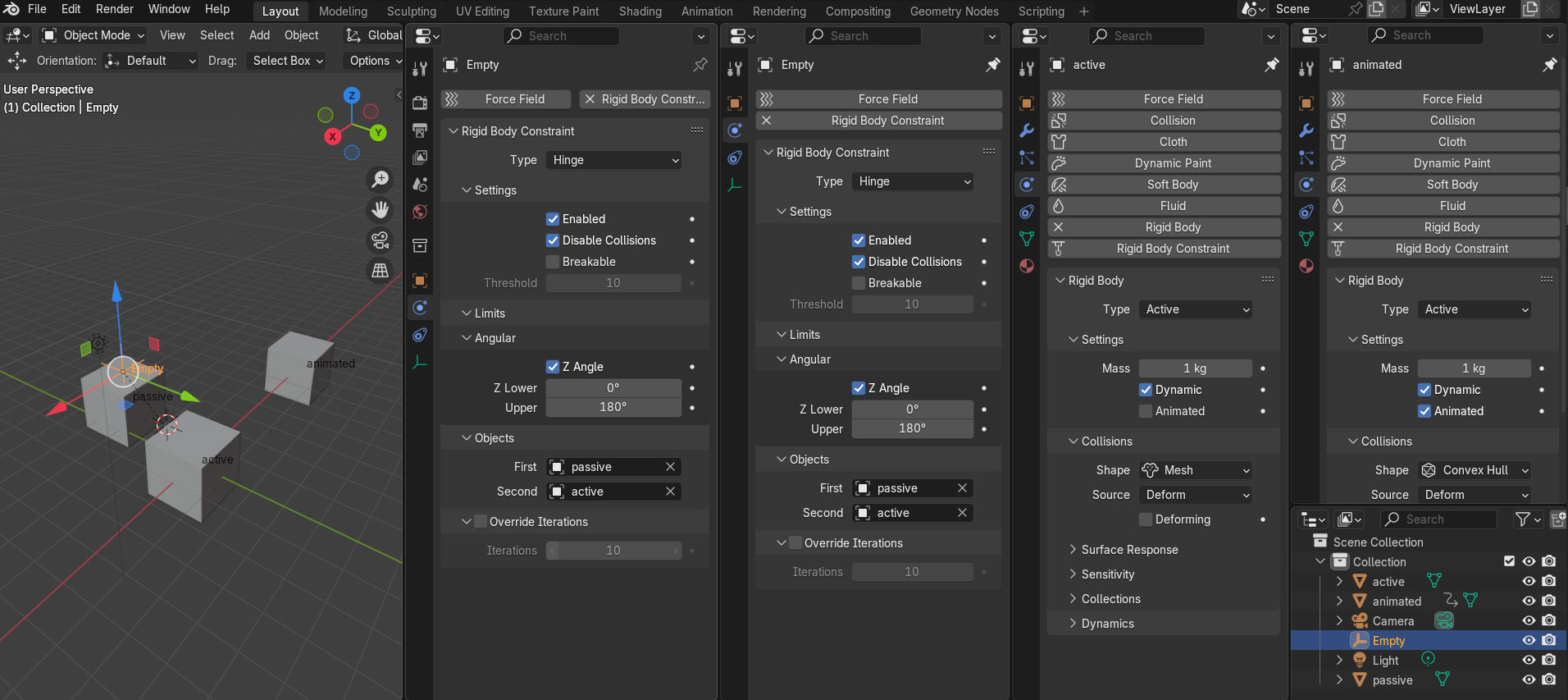
Différents règlage des paramètres sont possibles et se complète. Il se trouve à plusieurs endroits dans Blender.
1-Le "Rigid Body Tools" En bas du panneau T de la 3DView (sous le panel "Object Tools à gauche de la 3DView). - Détails -
2-Les panels de paramètrage de l'objet Rigid Body se trouve dans le context "Physics" de la fenêtre d'édition "Properties"- Détails -
3-Vous trouverez dans le panel "Rigid Body World" (situé le context "Scène" de la fenêtre d'édition "Properties")les paramètres généraux qui s'appliqueront à tous les objets dotés de rigid body et évoluant dans ce "world". Détails -
4-Il est possible de rajouter des contraintes
spécifiques aux objets ayant le physic RigidBody. Ainsi nous pourront obtenir des effet de piston, de glissement, de pendule, etc... - Détails -
Le "Rigid Body Tools" En bas du panneau T de la 3DView (sous le panel "Object Tools à gauche de la 3DView )permet de paramétrer très rapidement une simulation d'objets rigides.
Détermine la masse de l'objet
Copie les paramètres de l'objet actif sur les autres
Applique les transformations
Permet d'écrire les images clefs dans le dope sheet et dans le graph editor.
Crée une contrainte entre les corps rigides sélectionnés.
Permet de Changer la forme des collisions
Enlève le physic de l'objet sélectionné
Ajoute un rigid body Actif à l'objet sélectionné.
Ajoute un rigid body Passif à l'objet sélectionné.
Properties Rigid Body
Les panels de paramètre du Rigid Body se trouve dans le context "Physics" de la fenêtre d'édition "Properties".
Ajoute une contrainte à l'objet sélectionné
Ajoute un rigid body à l'objet sélectionné.
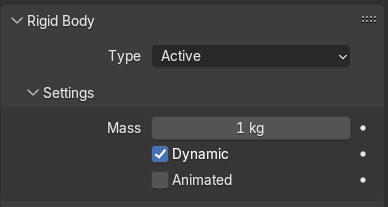
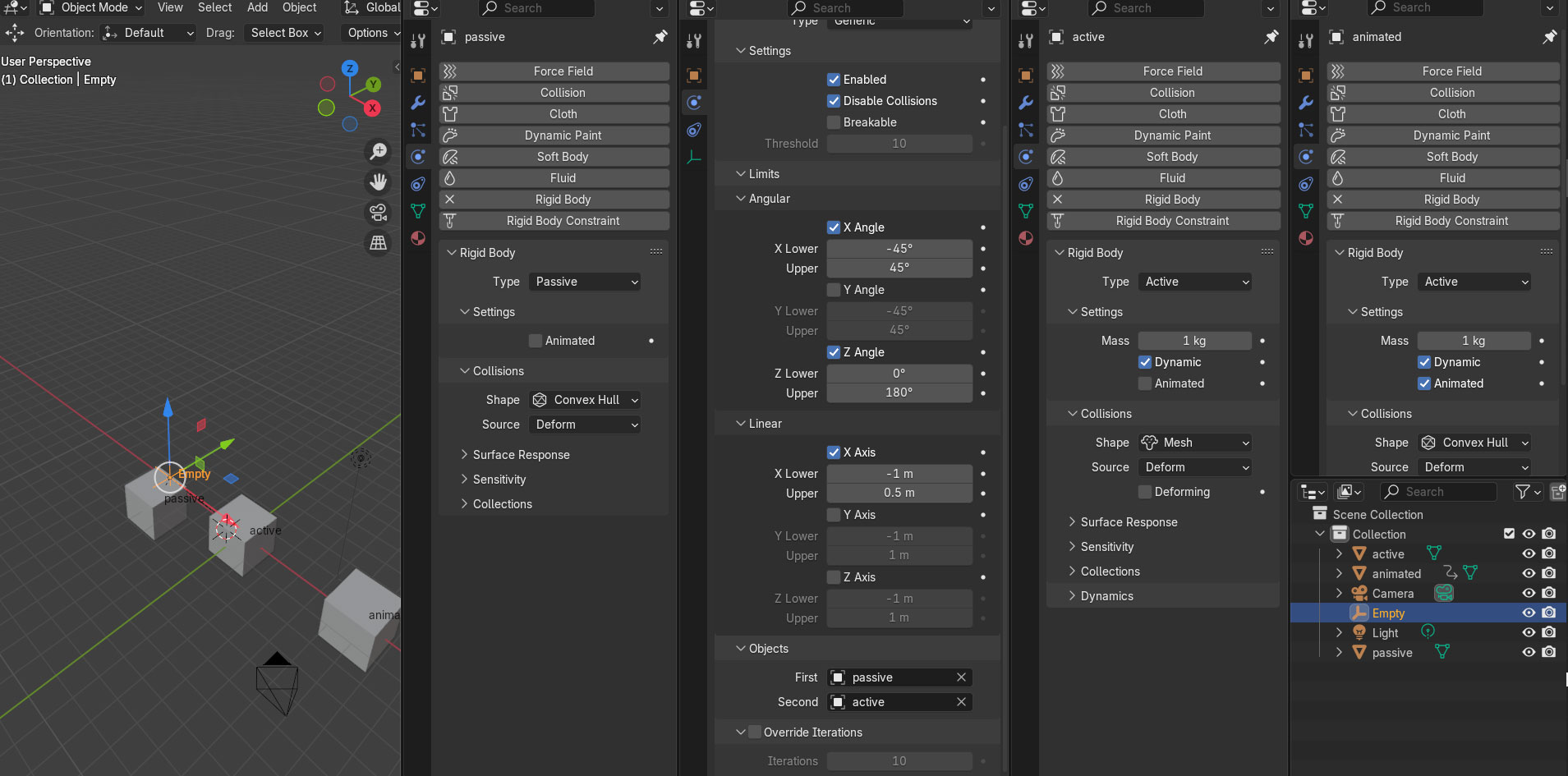
Rigid Body
Masse de l'objet en question. Dans le panel ci dessus Vous pouvez choisir entre plusieurs matériaux prédéfins.
Dynamic: Enlève l'objet de la simulation. Mais contrairement à l'option ci-dessous, il ne fera rien même s'il est percuté.
Détermine le rôle de l'objet. Si c'est actif, c'est lui qui fait l'action. Si c'est passif, c'est lui qui la subit.
(collision par exemple)
Animated : Permettra à un objet animer de rentrer en collision avec un autre objet. -Voir ci-dessous-
On peut utiliser l'élan d'un objet animé pour qu'il rentre en collision. Il faudra alors mettre des clefs d'animation sur la case Animated (ci-dessus)et les mettre entre les deux clefs d'animation du mouvement de l'objet.
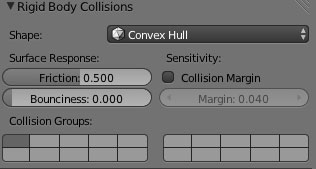
Rigid Body Collisions
Friction: Indique quelle quantité de vitesse perdra l'objet lorsqu'il rentre en collision avec les autres objets.
Bounciness:Tendance de l'objet à rebondir après une collision avec un autre (0 à 1) (de rigide à parfaitement élastique). Indique la quantité d'objets qui peuvent rebondir après une collision.
La collision entre deux objets situés sur deux calques différents ne peut se faire. Ici vous pouvez réassigner l'objet actif sur le même calque que l'objet passif avec lequel vous voulez qu'il rentre en collision.
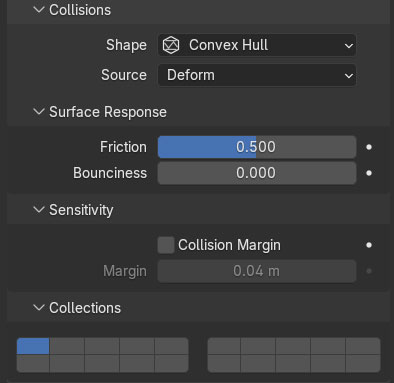
Enveloppe de détection des collisions. Il s'agit des parties inviolables de l'objet. Elle est calculée en tenant compte de la boite englobante de l'objet.
quantité de la marge
En créant pour certaine une marge autour de l'objet cela améliore le rendu.
NOTA :La marge ne fonctionne pas pour Le cone, le mesh
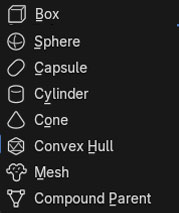
Une surface de type maillage englobant (par exemple, sous enveloppe rétractable) tous les sommets (meilleurs résultats avec moins de sommets). Une approximation convexe de l'objet, qui a de bonnes performances et une bonne stabilité.
Ceci indique l'axe Z
Formes de type sphère. Le rayon est le plus grand axe de la boîte d'encombrement.
Formes de type boîte (par exemple des cubes), y compris les plans (par exemple les plans au sol). La taille par axe est calculée à partir de la boîte d'encombrement.
Ceci indique l'axe Z. La hauteur est prise à partir de l'axe Z, tandis que le rayon est le plus grand des axes X ou Y.
Récupère les formes de collision des children de l'objet et les combine. Cela permet de créer des formes concaves à partir de formes primitives. Cela se traduit généralement par une simulation plus rapide que la forme de collision de maillage tout en étant généralement plus stable.
Mesh composé uniquement de triangles, permettant des interactions plus détaillées que les enveloppes convexes. Permet de simuler des objets concaves, mais est plutôt lent et instable.
Ceci indique l'axe Z. La hauteur est prise à partir de l'axe Z, tandis que le rayon est le plus grand des axes X ou Y.
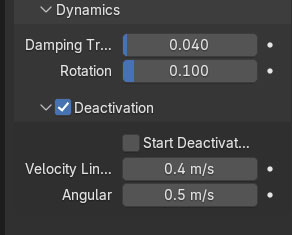
Rigid Body Dynamics
Indique la vitesse angulaire en dessous de laquelle la simulation sera désactivée
Indique la vitesse linéaire en dessous de laquelle la simulation sera désactivée
Désactive l'objet lors d'une simulation. il est réactivé en cas de collision.
Permet de préparer la désactivation de l'objet lors d'une simulation dans le cache.
Quantité de vitesse linéaire perdue dans le temps
Quantité de vitesse angulaire perdue dans le temps
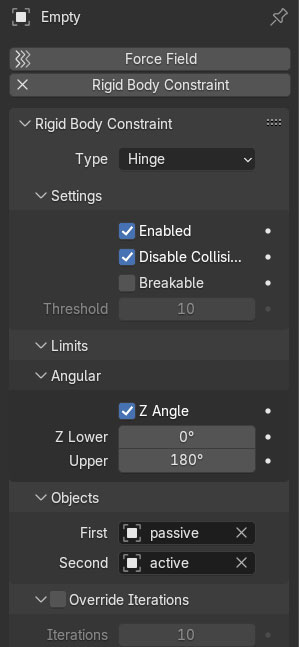
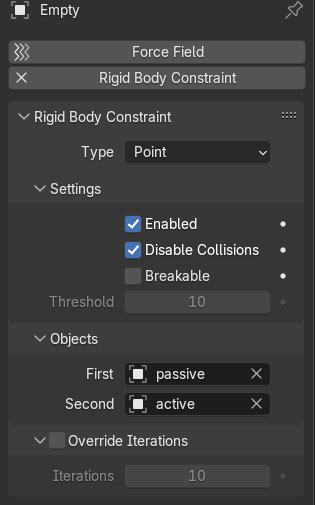
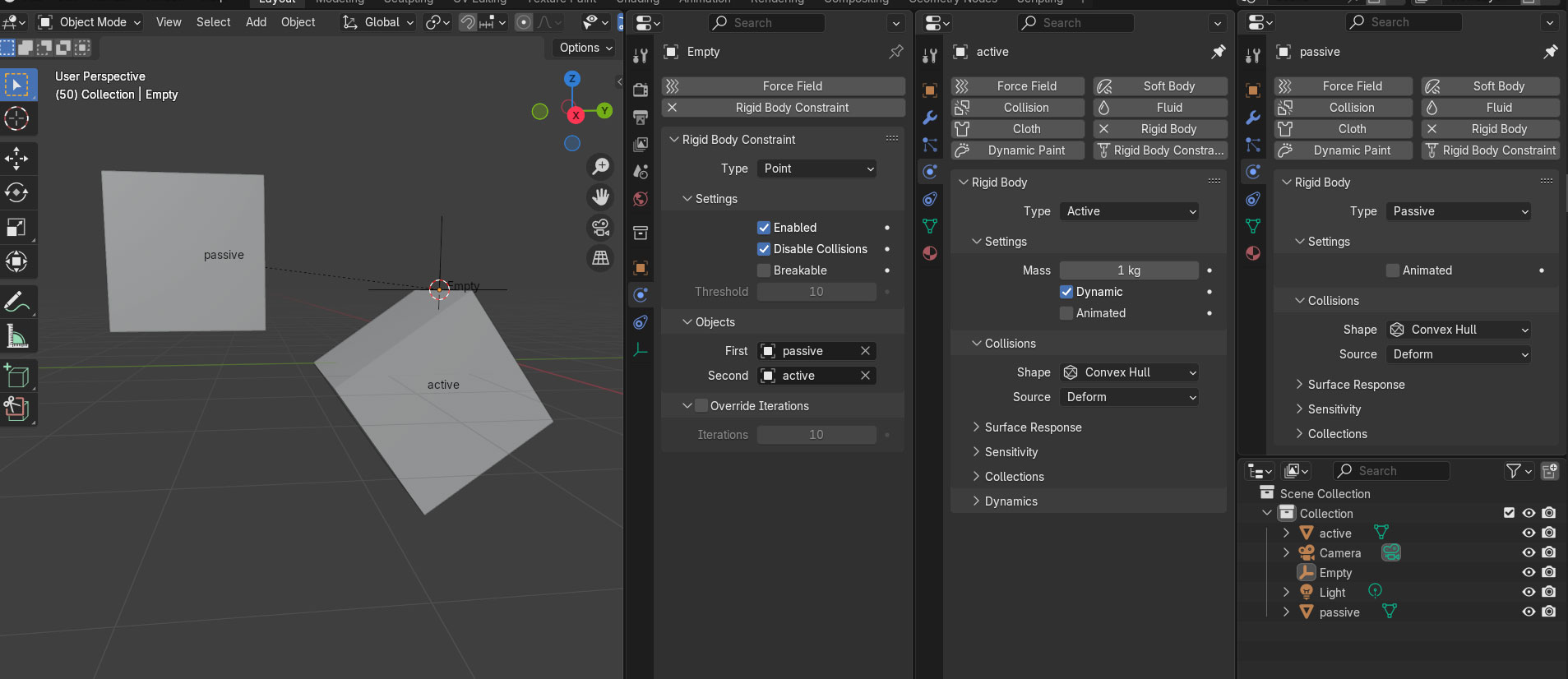
Premier objet à contraindre.
Permet de rendre les contraintes plus fortes (plus d'itérations) ou plus faibles (moins d'itérations) que celles spécifiées dans le monde des corps rigides.
Second objet à contraindre.
Nombre d'itérations du solveur de contrainte effectuées par pas de simulation pour cette contrainte.
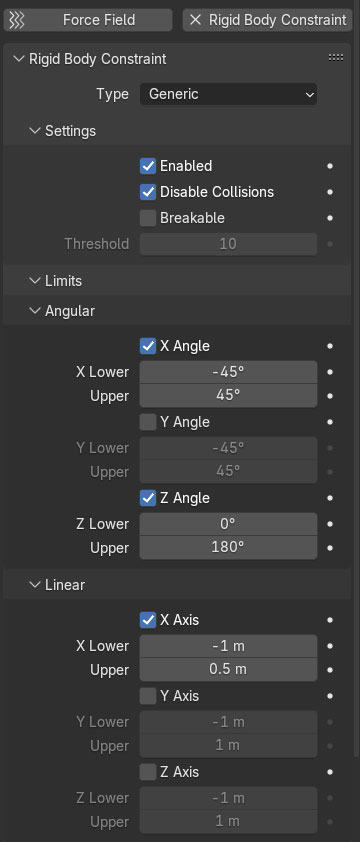
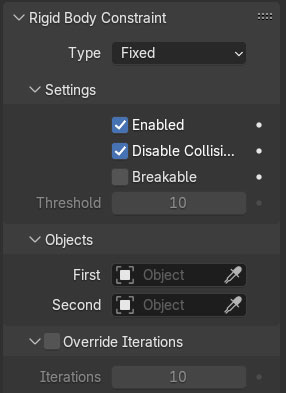
Type de contraintes
Spécifie si la contrainte est active pendant la simulation.
Jusqu'a l'angle 180
A partir de 0
Active la limite angulaire
La force d'impulsion qui doit être atteinte avant la cassure de la contrainte.
Permet à la contrainte de se casser pendant la simulation. Désactivé pour la contrainte Motor. Ceci peut être utile pour simuler une destruction.
Permet aux objets contraints de passer à travers l'un l'autre.
La charnière (hinge) permet un degré de liberté entre deux objets. Translation est complètement contrainte. Rotation est permise autour de l'axe Z de l'objet présentant la contrainte de physique (habituellement un Empty, distinct des deux objets qui sont actuellement liés). L'ajustement de la position et de la rotation de l'objet présentant la contrainte vous permet de contrôler l'ancrage et l'axe de la charnière.
Hinge est la seule contrainte de rotation sur un axe qui utilise l'axe Z au lieu de l'axe X. Si quelque chose ne va pas avec votre charnière, vérifiez vos autres contraintes pour voir si celle-ci pourrait être le problème.
Premier objet à contraindre.
Permet de rendre les contraintes plus fortes (plus d'itérations) ou plus faibles (moins d'itérations) que celles spécifiées dans le monde des corps rigides.
Second objet à contraindre.
Nombre d'itérations du solveur de contrainte effectuées par pas de simulation pour cette contrainte.
Type de contraintes
Spécifie si la contrainte est active pendant la simulation.
La force d'impulsion qui doit être atteinte avant la cassure de la contrainte.
Permet à la contrainte de se casser pendant la simulation. Désactivé pour la contrainte Motor. Ceci peut être utile pour simuler une destruction.
Permet aux objets contraints de passer à travers l'un l'autre.
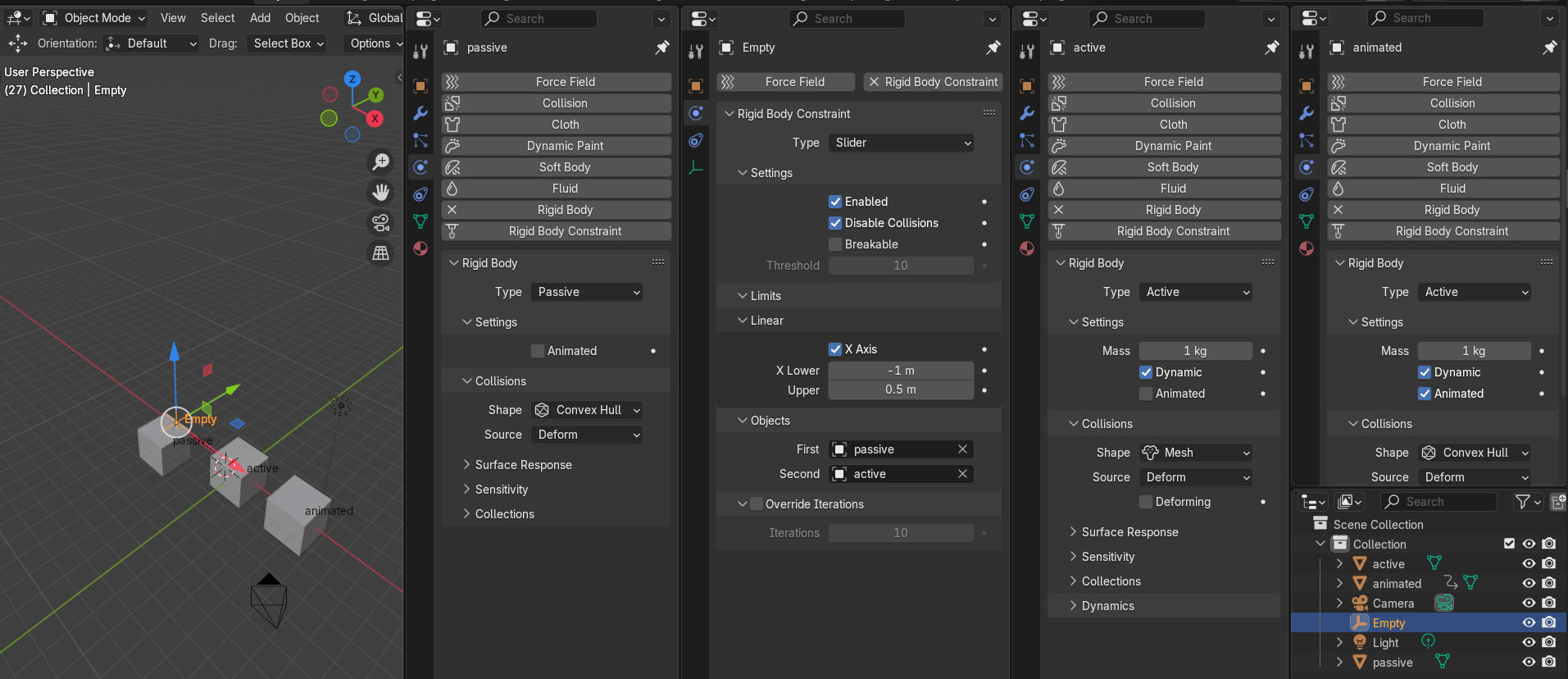
Les contraintes des axes X, Y et Z peuvent être utilisées pour limiter de translation entre les objets. Restreindre min/max à zéro a le même effet que la contrainte Point.
La limitation de la rotation relative à zéro maintient les objets en alignement. La combinaison d'une limitation en rotation et en translation absolues se comporterait beaucoup comme la contrainte Fixed.
L'utilisation d'un écart non nul sur n'importe quel paramètre lui permet d'osciller dans cette plage pendant toute la durée de la simulation.
Jusqu'à 0.5 m
Limit de déplacement en ligne droite à partir de -1m
Limite eglissement linéaire
Limite angulaire
jusqu'a 45
A partir de -45
Premier objet à contraindre.
Permet de rendre les contraintes plus fortes (plus d'itérations) ou plus faibles (moins d'itérations) que celles spécifiées dans le monde des corps rigides.
Second objet à contraindre.
Nombre d'itérations du solveur de contrainte effectuées par pas de simulation pour cette contrainte.
Type de contraintes
Spécifie si la contrainte est active pendant la simulation.
La force d'impulsion qui doit être atteinte avant la cassure de la contrainte.
Permet à la contrainte de se casser pendant la simulation. Désactivé pour la contrainte Motor. Ceci peut être utile pour simuler une destruction.
Permet aux objets contraints de passer à travers l'un l'autre.
Les contraintes des axes X, Y et Z peuvent être utilisées pour limiter de translation entre les objets. Restreindre min/max à zéro a le même effet que la contrainte Point.
La limitation de la rotation relative à zéro maintient les objets en alignement. La combinaison d'une limitation en rotation et en translation absolues se comporterait beaucoup comme la contrainte Fixed.
L'utilisation d'un écart non nul sur n'importe quel paramètre lui permet d'osciller dans cette plage pendant toute la durée de la simulation.
De -1m jusqu'à 1 m
De -1m jusqu'à 1 m
De -1m jusqu'à 0.5 m
Limite en glissement linéaire en Z
Limite en glissement linéaire en y
Limite en glissement linéaire en x
Limite angulaire en z
Limite angulaire en y
Limite angulaire en x
A partir de 0 jusqu'a 180
A partir de -45 jusqu'a 45
A partir de -45 jusqu'a 45
Premier objet à contraindre.
Permet de rendre les contraintes plus fortes (plus d'itérations) ou plus faibles (moins d'itérations) que celles spécifiées dans le monde des corps rigides.
Second objet à contraindre.
Nombre d'itérations du solveur de contrainte effectuées par pas de simulation pour cette contrainte.
Type de contraintes
Spécifie si la contrainte est active pendant la simulation.
La force d'impulsion qui doit être atteinte avant la cassure de la contrainte.
Permet à la contrainte de se casser pendant la simulation. Désactivé pour la contrainte Motor. Ceci peut être utile pour simuler une destruction.
Permet aux objets contraints de passer à travers l'un l'autre.
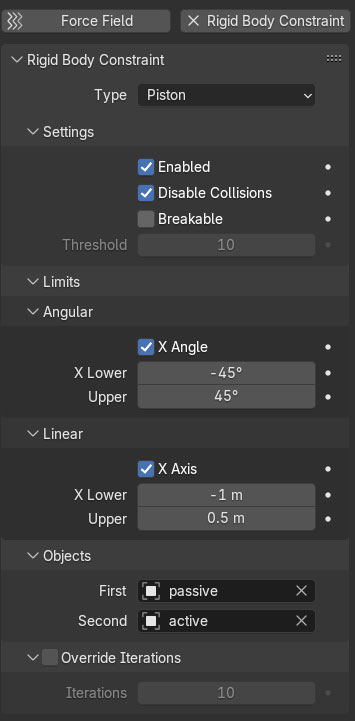
Un piston permet la translation sur l'axe X de l'objet contraint. Il permet aussi la rotation autour de l'axe X de l'objet contraint. C'est comme une combinaison de la liberté d'un curseur avec les libertés d'une charnière (aucun des deux n'est vraiment libre seul)
Jusqu'à 0.5 m
Limit de déplacement en ligne droite à partir de -1m
Limite eglissement linéaire
Limite angulaire en x
jusqu'a 45
A partir de -45
Premier objet à contraindre.
Permet de rendre les contraintes plus fortes (plus d'itérations) ou plus faibles (moins d'itérations) que celles spécifiées dans le monde des corps rigides.
Second objet à contraindre.
Nombre d'itérations du solveur de contrainte effectuées par pas de simulation pour cette contrainte.
Type de contraintes
Spécifie si la contrainte est active pendant la simulation.
La force d'impulsion qui doit être atteinte avant la cassure de la contrainte.
Limit de déplacement jusqu'a 0.5m
Limit de déplacement en ligne droite à partir de -1m
Permet à la contrainte de se casser pendant la simulation. Désactivé pour la contrainte Motor. Ceci peut être utile pour simuler une destruction.
Permet aux objets contraints de passer à travers l'un l'autre.
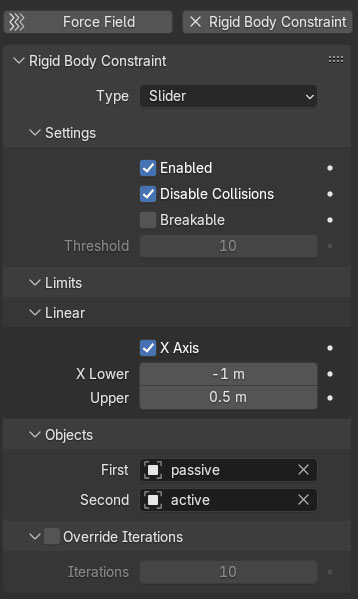
La contrainte Slider permet une translation relative sur l'axe X de l'objet contraint, mais ne permet ni rotation relative, ni translation relative sur d'autres axes
Limite en glissement linéaire
Premier objet à contraindre.
Permet de rendre les contraintes plus fortes (plus d'itérations) ou plus faibles (moins d'itérations) que celles spécifiées dans le monde des corps rigides.
Second objet à contraindre.
Nombre d'itérations du solveur de contrainte effectuées par pas de simulation pour cette contrainte.
Type de contraintes
Spécifie si la contrainte est active pendant la simulation.
La force d'impulsion qui doit être atteinte avant la cassure de la contrainte.
Permet à la contrainte de se casser pendant la simulation. Désactivé pour la contrainte Motor. Ceci peut être utile pour simuler une destruction.
Permet aux objets contraints de passer à travers l'un l'autre.
Les objets sont liés par un contact ponctuel permettant toutes sortes de rotation autour de la position de l'objet contraint, mais aucune translation relative est permise. Le moteur de physique va faire de son mieux pour s'assurer que les deux points désignés par l'objet contraint sur les deux objets contraints coïncident.
Premier objet à contraindre.
Permet de rendre les contraintes plus fortes (plus d'itérations) ou plus faibles (moins d'itérations) que celles spécifiées dans le monde des corps rigides.
Second objet à contraindre.
Nombre d'itérations du solveur de contrainte effectuées par pas de simulation pour cette contrainte.
Type de contraintes
Spécifie si la contrainte est active pendant la simulation.
Le parent
l'enfant
La force d'impulsion qui doit être atteinte avant la cassure de la contrainte.
Permet à la contrainte de se casser pendant la simulation. Désactivé pour la contrainte Motor. Ceci peut être utile pour simuler une destruction.
Permet aux objets contraints de passer à travers l'un l'autre.
Il est possible de rajouter des contraintes
spécifiques aux objets ayant le physic RigidBody. Ainsi nous pourront obtenir des effet de piston, de glissement, de pendule, etc...
La charnière (hinge) permet un degré de liberté entre deux objets. Translation est complètement contrainte. Rotation est permise autour de l'axe Z de l'objet présentant la contrainte de physique (habituellement un Empty, distinct des deux objets qui sont actuellement liés). L'ajustement de la position et de la rotation de l'objet présentant la contrainte vous permet de contrôler l'ancrage et l'axe de la charnière.
Hinge est la seule contrainte de rotation sur un axe qui utilise l'axe Z au lieu de l'axe X. Si quelque chose ne va pas avec votre charnière, vérifiez vos autres contraintes pour voir si celle-ci pourrait être le problème.- Détails -
Les contraintes des axes X, Y et Z peuvent être utilisées pour limiter de translation entre les objets. Restreindre min/max à zéro a le même effet que la contrainte Point.
La limitation de la rotation relative à zéro maintient les objets en alignement. La combinaison d'une limitation en rotation et en translation absolues se comporterait beaucoup comme la contrainte Fixed.
L'utilisation d'un écart non nul sur n'importe quel paramètre lui permet d'osciller dans cette plage pendant toute la durée de la simulation.
La contrainte Generic Spring ajoute quelques paramètres de ressort pour les axes X/Y/Z à toutes les options disponibles sur la contrainte Generic. L'utilisation du ressort seul permet aux objets de rebondir alentour comme s'ils étaient attachés avec un ressort ancré dans l'objet contraint. C'est habituellement un peu trop de liberté, aussi la plupart des applications vont bénéficier de l'activation de contraintes de translation et de rotation.
Si l'amortissement des ressorts est défini à 1, alors on empêche les forces des ressorts de réaligner les points d'ancrage, ce qui entraîne un comportement étrange. Si vos ressorts ont un comportement étrange, vérifiez l'amortissement.
La contrainte Motor entraîne une translation et/ou rotation entre deux entités. Elle peut piloter deux objets séparément ou ensemble. Elle peut piloter une rotation simple, ou une rotation et une translation (même s'il ne sera pas contraint comme une vis puisque la translation peut être bloquée par d'autres physiques sans empêcher la rotation).
L'axe de rotation est l'axe X de l'objet hébergeant la contrainte. C'est le contraire de la contrainte Hinge qui utilise l'axe Z. Puisque Motor est vulnérable aux perturbations déroutantes sans une contrainte Hinge correspondante, un soin particulier doit être pris pour aligner les axes. Sans alignement propre, le moteur semble n'avoir aucun effet (parce que le hinge empêche le mouvement du moteur).
Un piston permet la translation sur l'axe X de l'objet contraint. Il permet aussi la rotation autour de l'axe X de l'objet contraint. C'est comme une combinaison de la liberté d'un curseur avec les libertés d'une charnière (aucun des deux n'est vraiment libre seul).- Détails -
La contrainte Slider permet une translation relative sur l'axe X de l'objet contraint, mais ne permet ni rotation relative, ni translation relative sur d'autres axes. - Détails -
Les objets sont liés par un contact ponctuel permettant toutes sortes de rotation autour de la position de l'objet contraint, mais aucune translation relative est permise. Le moteur de physique va faire de son mieux pour s'assurer que les deux points désignés par l'objet contraint sur les deux objets contraints coïncident. - Détails -
Cette contrainte fait que les deux objets se déplacent comme un seul objet. Étant donné que le système physique a un tout petit peu de jeu, les objets ne se déplacent pas aussi rigidement qu'ils devraient s'ils faisaient partie du même maillage.